
Modkit.com was home to graphical programming environments for Robotics and Microcontrollers
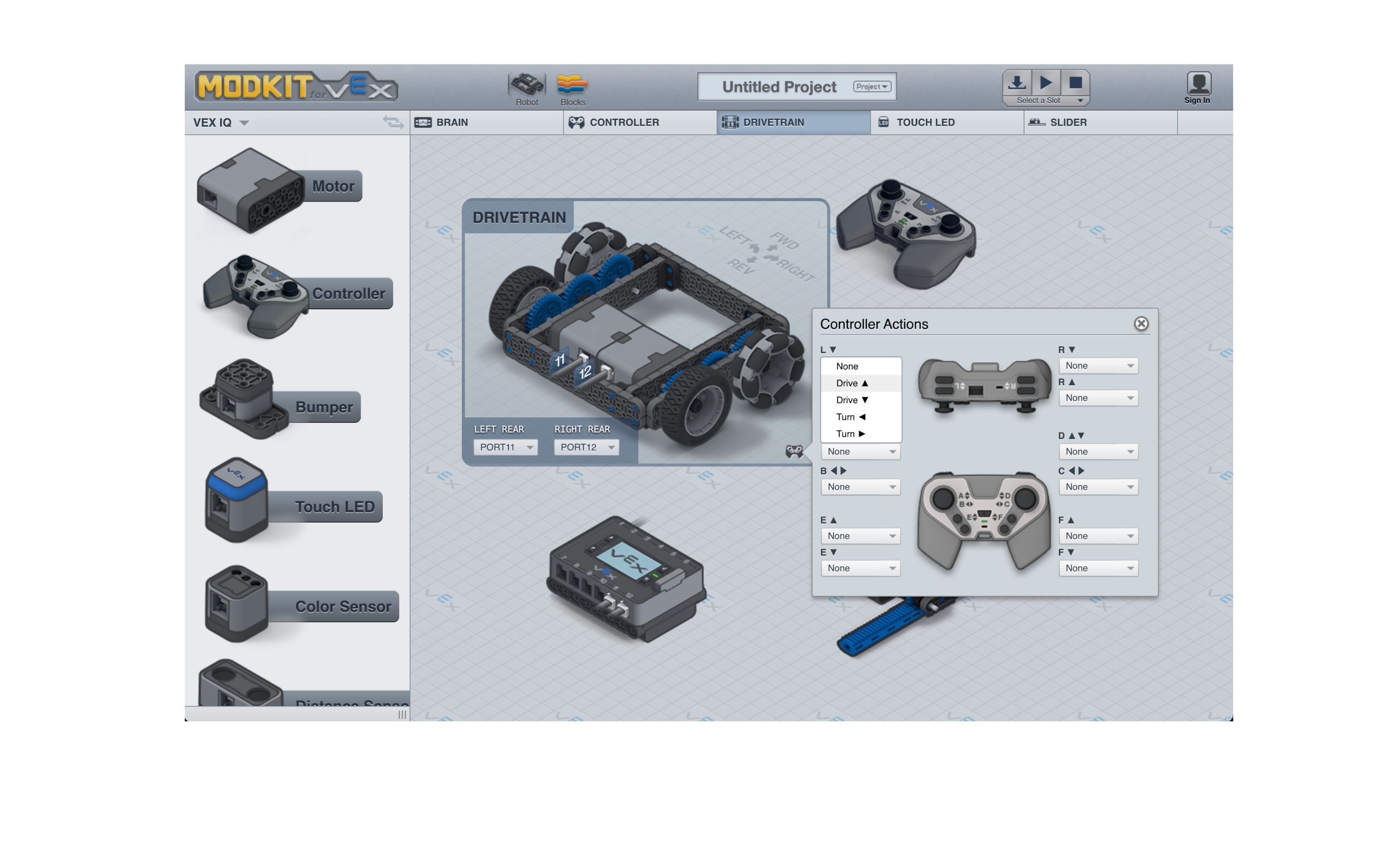
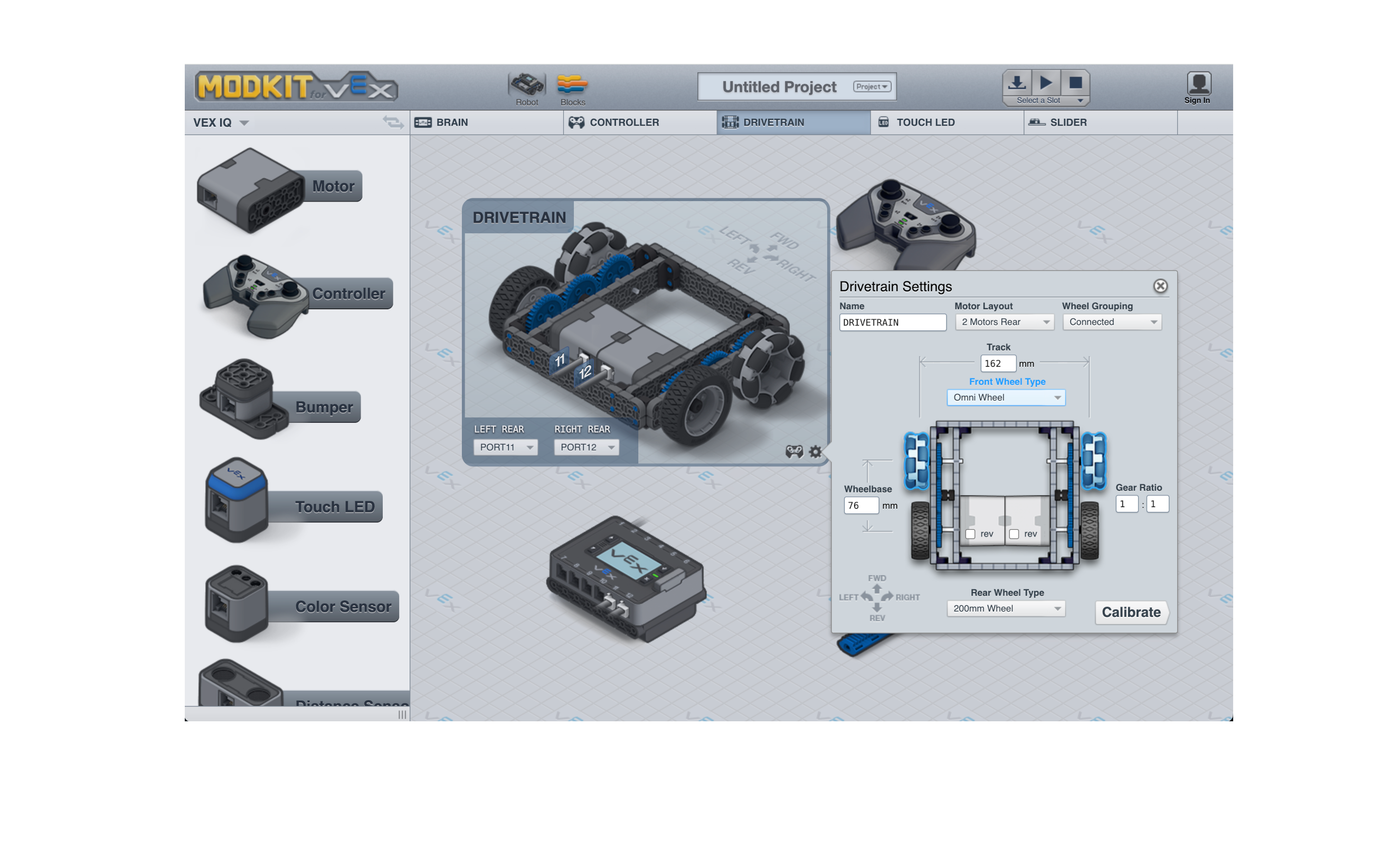
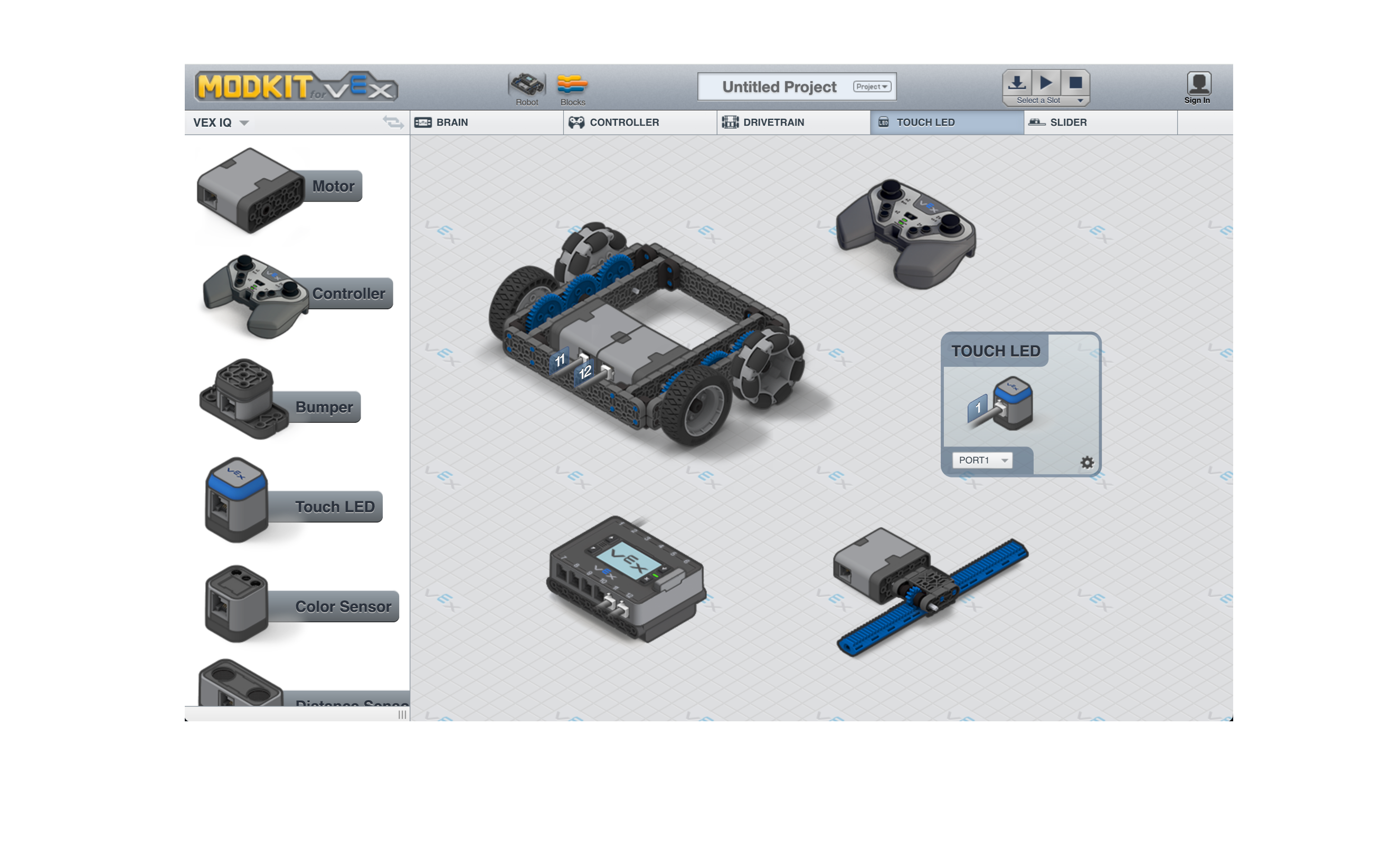
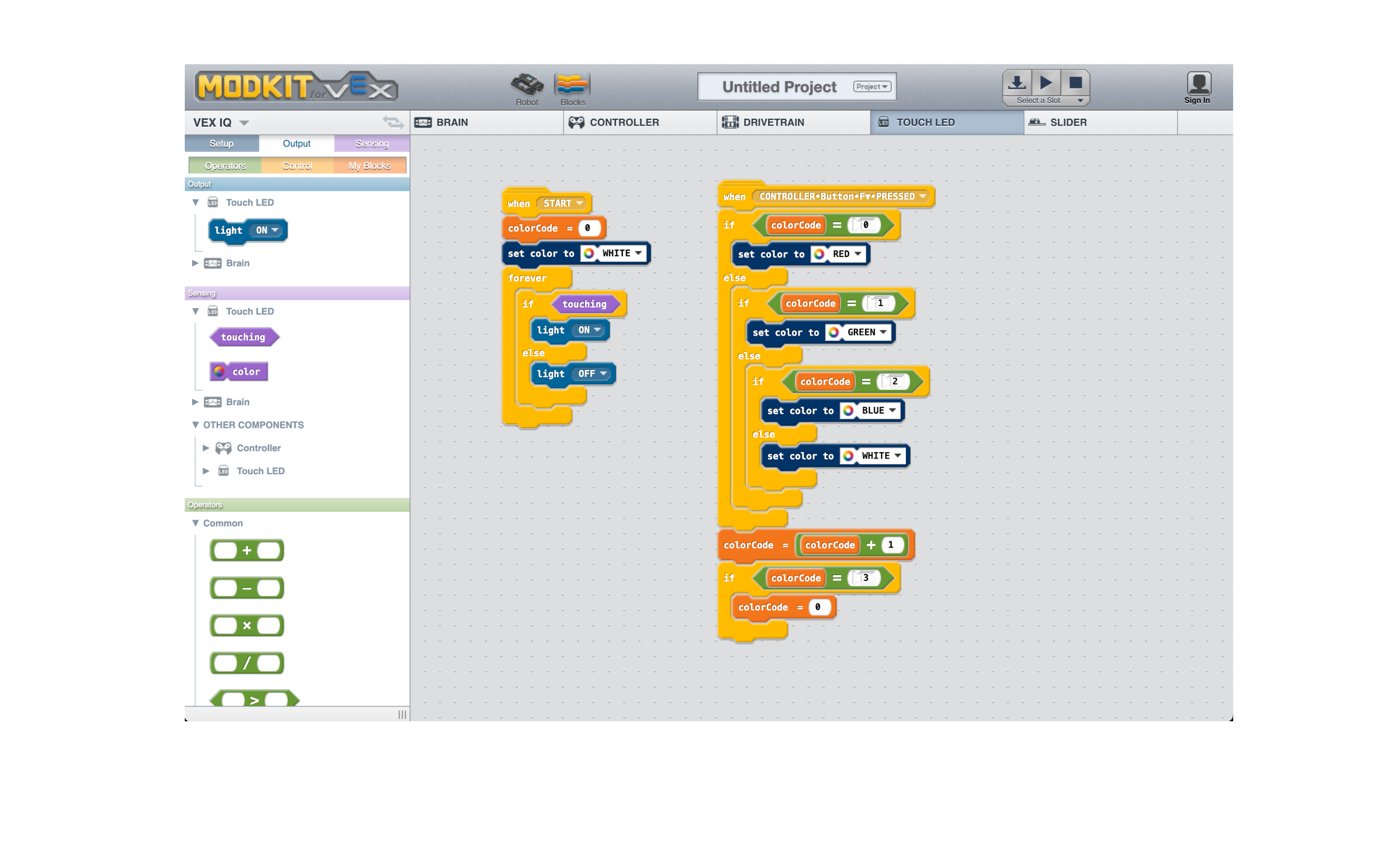
Screenshots of the discontinued Modkit for VEX software
If you came here looking to program your VEX IQ robot, you can check out VEXCode. If you're feeling nostalgic and want to browse the old Modkit.com site, you can check out the Web Archive at archive.org*
* please be aware the Web Archive should only be used for historical reference and contains outdated information.